╬█╦«╠Ä└Ē▀^│╠Ą─ČÓūā┴┐ŅA£y┐žųŲ
ųąć°╬█╦«╠Ä└Ē╣ż│╠ŠW ĢrķgŻ║2010-1-14 15:40:38
╬█╦«╠Ä└Ē╝╝ąg | ģRŠ█╚½Ū“Łh▒Ż┴”┴┐Ż¼ĮĄĄ═Ų¾śIų╬╬█│╔▒Š
į┌╗Ņąį╬█─ÓĘ©╬█╦«╔·╗»╠Ä└Ē▀^│╠Ą─┐žųŲ蹊┐ųąŻ¼┐╔ęįū„×ķ╩▄┐žūā┴┐║═▓┘ū„ūā┴┐Ą─ėąįSČÓŻ¼╚ń║╬▀Mąą▌ö╚ļ▌ö│÷ūā┴┐┼õī”Ż¼ęčĮøėąę╗ą®Įø“×Ę©ätŻ¼ę╗░Ń╩Ū┼cŠ▀¾wĄ─╣ż╦ć┴„│╠┼õų├ėąĻPĄ─ĪŻė╔ė┌╔·╗»Ę┤æ¬Ų„ā╚Ė„ūė▀^│╠ęį╝░┼cČ■┤╬│┴ĮĄ│žų«ķgĄ─ģóöĄ┤µį┌ŽÓ╗źĻP┬ōŻ¼▓╔ė├å╬╗ž┬Ę┐žųŲĢrŽĄĮyķg▒ž╚╗┤µį┌±Ņ║Ž¼FŽ¾ĪŻę“┤╦į┌įOėŗ┐žųŲŽĄĮyĢrŻ¼Ė³ČÓĄžæ¬įō░č╔·╗»Ę┤æ¬▀^│╠Ą─ų„ę¬╩▄┐žūā┴┐║═▓┘ū„ūā┴┐ū„×ķę╗éĆš¹¾w┐╝æ]Ż¼╝┤śŗįņČÓūā┴┐┐žųŲŽĄĮyĪŻ
▒Š╬─ęį¾w¼FŽĄĮyā╚▓┐Ž§╗»╝░Ę┤Ž§╗»╔·╗»Ę┤æ¬▀Mš╣ĀŅørĄ─2╠¢╔·╗»Ę┤æ¬Ų„ųąĄ─░▒Ą¬┼cŽ§╦ߥ¬ØŌČ╚×ķ▒╗┐žī”Ž¾Ż¼ęį╚▄ĮŌč§įOČ©ųĄ(DO)╝░ā╚裣h┴„┴┐×ķ▓┘ū„ūā┴┐Ż¼▓╔ė├╗Ņąį╬█─Ó1╠¢─Żą═(AsM1)×ķ┐žųŲŲ„įOėŗ─Żą═Ż¼įOėŗ┴╦ČÓūā┴┐ŅA£y┐žųŲ╦ŃĘ©ĪŻ═©▀^ī”ASM1─Żą═Ą─ķ]Łh┐žųŲĘ┬šµŻ¼ĮY╣¹▒Ē├„ČÓūā┴┐ŅA£y┐žųŲ┼cé„ĮyĄ─ĦĮŌ±Ņ▒╚└²ĘeĘų╬óĘų(PID)┐žųŲŽÓ▒╚Ż¼į┌ĮŌ±Ņ║═äėæBąį─▄Ą╚ĘĮ├µŠ▀ėąĖ³║├Ą─┐žųŲŲĘ┘|ĪŻ
1 ŽĄĮy├Ķ╩÷┼c┐žųŲĘĮ░ĖįOėŗ
1Ż«1 öĄīW─Żą═Ęų╬÷
Ąõą═Ą─╗Ņąį╬█─ÓĘ©╬█╦«╔·╗»╠Ä└Ē▀^│╠░³└©╔·╗»Ę┤æ¬│ž║═│┴ĄĒ│žŻ¼╚ńłD1╦∙╩ŠĪŻŲõųąĘ┤æ¬│žĘų×ķ5éĆ│žŻ¼│┴ĄĒ│žĘų×ķ1OīėĪŻŲõöĄīW─Żą═ė╔ė┌Ųõā╚▓┐Å═ļsĄ─ÖC└ĒĻPŽĄČ°ĘŪ│ŻÅ═ļsŻ¼ūŅ│Żė├Ą─öĄīW─Żą═╩Ūć°ļH╦«┘|ģfĢ■1986─Ļ═Ų│÷Ą─ASM1─Żą═n]Ż¼░³║¼13ĘNĮMĘųĄ─ūā┴┐Ż¼į┌┴„═©ųą▀Mąą8éĆūėĘ┤æ¬▀^│╠ĪŻį┌├┐éĆ╔·╗»Ę┤æ¬│žųąŻ¼╬’┴Žūā╗»ū±čŁ╬’┴ŽŲĮ║Ō╣½╩ĮŻ║
└█Ęe┴┐ - Ę┤æ¬╔·│╔┴┐ + ▌ö╚ļ┴┐ - ▌ö│÷┴┐(1)
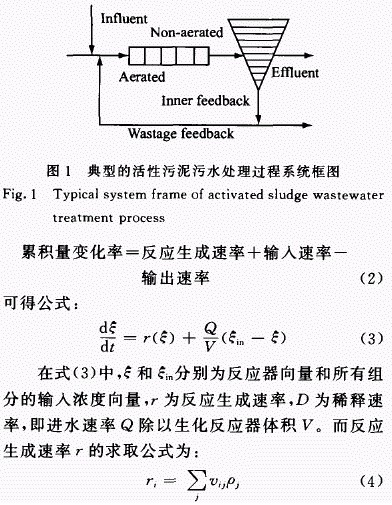
│┴ĄĒ│žĄ─öĄīW─Żą═▓╔ė├TakacsĄ╚ĪŻķ_░lĄ─Č■┤╬ųĖöĄ│┴ĄĒ╦┘┬╩─Żą═─ŻöM│┴ĄĒ▀^│╠ĪŻė╔ė┌į┌▀Mąą╬█╦«╔·╗»╠Ä└Ē▀^│╠ųąĄ─Ą¬╚ź│²ĢrŻ¼ų„ę¬╩Ū┐žųŲ╔·╗»Ę┤æ¬ųąĄ─Ž§╗»╝░Ę┤Ž§╗»Ę┤└╚ųv│╠Ż¼╚▒č§ģ^Ą──®Č╦╝┤2╠¢Ę┤æ¬Ų„ā╚Ą─S N0║═S NH ūŅ×ķĻPµIŻ¼ę“┤╦┐╔īóįō╠¢Ę┤æ¬Ų„ā╚Ą─S N0║═S NH ū„×ķ▒╗┐žūā┴┐ĪŻ
1Ż«2 ┐žųŲŽĄĮyĮYśŗĘų╬÷
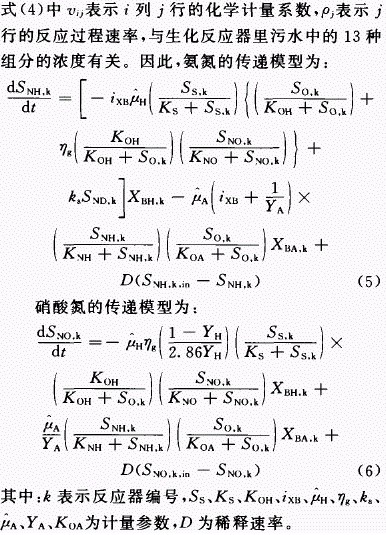
ī”ASM1─Żą═üĒšfŻ¼╬█╦«╠Ä└ĒĄ─╦«┘|┐žųŲųĖś╦ę╗░Ń╩ŪS N0║═S NH ╚¶▓╔ė├å╬╗ž┬ĘPID┐žųŲŻ¼«öā╚裣h┴„┴┐Q║═╚▄ĮŌč§ØŌČ╚DOūā╗»ĢrS N0║═S NH Č╝īóļSų«ūā╗»Ż¼ā╔┬Ę▌ö╚ļ┼cā╔┬Ę▌ö│÷ų«ķg┤µį┌Į╗▓µ±Ņ║ŽĻPŽĄĪŻ
ŽÓī”į÷굊žĻć(RGA)[3]┐╔ė├üĒĘų╬÷ČÓūā┴┐ŽĄĮyĄ─ūā┴┐ķg±Ņ║ŽĻPŽĄŻ¼ŠžĻćĄ─Ė„éĆį¬╦žĘ┤ė│┴╦Ė„▌ö│÷ūā┴┐╩▄▌ö╚ļūā┴┐ė░ĒæĄ─│╠Č╚ĪŻī”ASM1─Żą═į┌MATLABŻ»SIMULINKŁhŠ│Ž┬▀MąąĘ┬šµėŗ╦ŃŻ¼Ą├ĄĮā╚裣h┴„┴┐Q ║═╚▄ĮŌč§ØŌČ╚DOā╔éĆ▓┘┐vūā┴┐┼c▒╗┐žūā┴┐░▒Ą¬ØŌČ╚S NH ║═Ž§╦ߥ¬ØŌČ╚S N0Ą─ĘĆæBį÷굊žĻć×ķŻ║
2 ┐žųŲŽĄĮyįOėŗ╝░Ę┬šµ
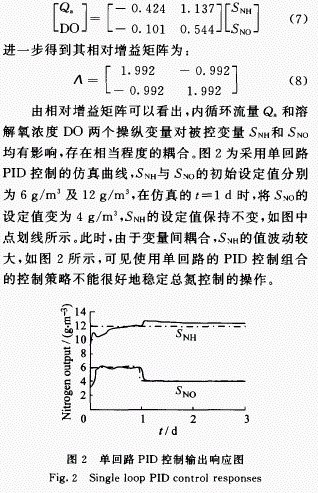
ė╔ęį╔ŽĘų╬÷┐╔ų¬Ż¼╚ń╣¹Ęųäeī”S NH ║═ S N0 ▀Mąąå╬╗ž┬Ę┐žųŲŻ¼▓╗─▄ĮŌøQ nS NH ║═ S N0 ų«ķg┤µį┌Ą─±Ņ║Žå¢Ņ}ĪŻ╚ń╣¹ŲõųąĄ─ę╗éĆūā┴┐│÷¼F▓©äėŻ¼▒žīóė░ĒæĄĮ┴Ē═Ōę╗éĆūā┴┐Ą─ųĄŻ¼╩╣ų«ę▓│÷¼F▓©äėŻ¼ę“Č°öMī”▀@ā╔éĆ▒╗┐žūā┴┐īŹ╩®ČÓūā┴┐ŅA£y┐žųŲĘĮ░ĖĪŻ
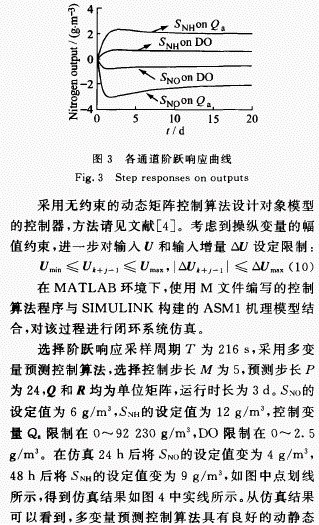
╩ūŽ╚▓╔ė├ĘĆæBĮ©─ŻŻ¼į┌ĘĆæBŽ┬ī”Q ĪóDO╩®╝ėļA▄S▌ö╚ļŻ¼Ą├ĄĮī”Ž¾Ēææ¬╚ńłD3╦∙╩ŠŻ¼Å─Č°½@Ą├ī”Ž¾Ą─ŅA£y─Żą═ĪŻ
ģó┐╝╬─½IŻ║
[1] Henze MŻ¼Grady Jr C P LŻ¼Gujer WŻ¼et alŻ¼Activated sludge model NoŻ«1[A]Ż«IAWPRC scientific and technical reports[c]Ż«LondonŻ║IAWPRCŻ¼1987Ż«
[2] Takacs IŻ¼Party G GŻ¼Nolasco DŻ«A dynamic model of the clari-fication thickening process[J]Water ResearchŻ¼1991Ż¼25(10)1263-1271Ż«
[3] ═§╣į÷Ż«Ė▀Ą╚▀^│╠┐žųŲ[M]Ż«▒▒Š®Ż║ŪÕ╚A┤¾īW│÷░µ╔ńŻ¼2002Ż«
[4] ╩µĄŽŪ░Ż«ŅA£y┐žųŲŽĄĮy╝░Ųõæ¬ė├[M]▒▒Š®ÖCąĄ╣żśI│÷░µ╔ńŻ¼1996Ż«ū„š▀: ÓŹ├¶ØŹŻ¼ ŚŅ±Rėó

